در طراحی سیرکولاسیون، حدس و تجربه بهتنهایی کافی نیستند؛ مسیرهای بهینه زمانی بهدست میآیند که هندسه، رفتار کاربر و الزامات ایمنی به دادههای سنجشپذیر تبدیل شوند. رویکرد دادهمحور با تعریف قیود (عرضها، شیبها، درگاهها، مسیرهای اضطراری)، استخراج شاخصهای عملکردی (KPI) و اجرای بهینهسازی چندمعیاره، گزینههای مسیر را تولید و رتبهبندی میکند. خروجی این فرآیند، یک نقشهٔ تصمیم شفاف است که میتواند مستقیم به مدلهای BIM/CAD متصل شود و ردیابی تغییرات را ممکن سازد.
برای کنترل و بهینهسازی سیرکولاسیون، شاخصها باید کمی، قابل تکرار و پیوندخورده با مدل باشند. فهرست زیر KPIهای توصیهشده را ارائه میکند:
پس از اندازهگیری KPIها، یک تابع هدف بر اساس وزندهی پروژه ساخته میشود (مثلاً ایمنی > کارایی > راحتی). سپس با الگوریتمهای Optimization، گزینههای مسیر تولید، ارزیابی و انتخاب میشوند. این چرخه تا رسیدن به آستانههای هدف تکرار شده و نتایج برای BIM/CAD جهت دیتیلینگ و مستندسازی نهایی ارسال میگردد.
| KPI | تعریف فنی | فرمول/روش اندازهگیری | واحد | آستانه هدف (عادی / اوج / اضطرار) |
منبع/لایهٔ داده |
|---|---|---|---|---|---|
| ATD — Average Travel Distance 🚶♀️ | میانگین طول سفر میان مبادی پرتردد در شبکهٔ مسیر | میانگین فاصلهٔ کوتاهترین مسیر بین جفتنقاط پرتردد (OD Pairs) | m | < 45 / < 55 / — | BIM/CAD (گراف مسیر)، تحلیل OD |
| ACT — Average Circulation Time ⏱️ | میانگین زمان طی مسیر شامل تأخیر تقاطعها | ∑(طول/سرعت) + ∑(Delay در تقاطعها) | s | < 60 / < 75 / — | شبیهسازی جریان، سناریو عادی/اوج |
| CUR — Corridor Utilization Rate 📈 | نسبت دبی عبوری به ظرفیت مؤثر مقطع | Q / Qcap (غیرخطی نزدیک آستانه) | ratio | 0.4–0.7 / ≤0.8 / — | حسگر شمارش/شبیهسازی، مقطع BIM |
| ID — Intersection Density 🔀 | تعداد تقاطع مؤثر در هر ۱۰ متر مسیر اصلی | #تقاطع / 10m (Spine) | #/10m | ≤ 1 / ≤ 1.2 / — | استخراج توپولوژی از CAD/BIM |
| ECT — Egress Clearance Time 🧯 | زمان تخلیه تا خروج ایمن در سناریوی بدبینانه | شبیهسازی تخلیه با محدودیت درگاه/عرض/تراکم | s | — / — / ≤ حد کُدی | شبیهسازی تخلیه، مقررات (Code) |
| WCI — Wayfinding Clarity Index 🧭 | خوانایی مسیر بر اساس دید محوری و پیچیدگی شبکه | نمرهٔ مرکب (دید مستقیم، تغییر جهت، علائم) | 0–100 | ≥ 70 / ≥ 65 / — | تحلیل دید/گراف، ممیزی میدانی |
| SAS — Space Adjacency Score 🧩 | امتیاز همجواری عملکردی بین فضاهای کلیدی | ∑ ماتریس وزندار مجاورتهای مطلوب/نامطلوب | 0–100 | ≥ 75 / ≥ 70 / — | برنامهٔ فیزیکی + نقشهٔ همجواری |
| SCR — Service Conflict Rate 🛠️ | نرخ تداخل مسیرهای خدماتی با تردد عمومی | #تداخل / ساعت (در پنجرهٔ عملیات) | #/h | ≤ 2 / ≤ 3 / — | زمانسنجی عملیات، مسیرهای سرویس |
| CCS — Code Compliance Score ✅ | امتیاز انطباق عرضها، درگاهها، دسترسپذیری و خروج | Checklists → نمرهٔ وزنی بندهای الزامی/توصیهای | 0–100 | ≥ 95 / ≥ 95 / ≥ 100% بندهای اضطرار | ممیزی کُدی، مدل BIM + مستندات |
در بهینهسازی سیرکولاسیون، الگوریتمها بهجای یک معیارِ ساده، معمولاً یک تابع هدف مرکب را مینیمم میکنند که از ترکیب هزینههای حرکتی و ریسکهای عملکردی ساخته شده است. این تابع، پس از نرمالسازی شاخصها و اعمال وزندهی سناریومحور، با ترمهای پنالتی برای نقض قیود تکمیل میشود. بسته به راهبرد، خروجی میتواند یک راهحل تکی (وزندار) یا جبههٔ پارتو از گزینههای غیرمغلوب باشد.
تابع هدفِ توصیهشده، جمع وزندارِ هزینههای حرکتی + ریسکهای ازدحام + خوانایی مسیر است. هستهٔ محاسباتی میتواند این مؤلفهها را شامل شود:
برای جلوگیری از کیورد استافینگ و بایاس، تمام متریکها نرمالسازی میشوند (۰–۱) و وزنها بهصورت سناریومحور (اوج بهرهبرداری، اضطرار، تعمیرات) بازکالیبره میگردند. در صورت تضاد معیارها، انتخاب نهایی از روی جبههٔ پارتو با روشهای MCDM انجام میشود.
مدل بدون قیود معنایی ندارد. قیود به دو گروه سخت (Hard) و نرم (Soft) تقسیم میشوند؛ اولی غیرقابل نقض است، دومی با پنالتی کنترل میشود. پیشنهاد پیادهسازی:
فرآیند پیشنهادی: تعریف رسمی قیدها → تبدیل به نامساوی/برابری → الحاق به تابع هدف (پنالتی/لاگرانژ) → حل با جستوجوی هیبریدی (ژنیتیک/سیمولیتد آنیلینگ + بهینهسازی محلی) → تحلیل حساسیت وزنها → انتخاب با MCDM و مستندسازی در BIM/CAD.
| شناسه قید | نوع | شرح دقیق | مقدار/آستانه | روش اعتبارسنجی | جریمه/اقدام اصلاحی |
|---|---|---|---|---|---|
| 🛣️ حداقل عرض کریدور | Hard | عرض مؤثر مسیر اصلی/فرعی با احتساب موانع | اصلی ≥ 1.8m • فرعی ≥ 1.2m | اندازهگیری در BIM/CAD روی محور Spine | رد گزینه یا افزایش عرض؛ پنالتی ∝ (آستانه − عرض)+ |
| 🧯 فاصله تا خروج ایمن (ECT) | Hard | حداکثر طول/زمان تخلیه تا نزدیکترین خروج | ECT ≤ حد کُدی سناریوی اضطرار | شبیهسازی تخلیه + مسیرسنجی کوتاهترین راه | گزینه مردود؛ الزام افزودن درِ خروج/اصلاح مسیر |
| ♿ شعاع چرخش ویلچر | Hard | شعاع گردش در تقاطعها/ورودی فضاهای حساس | R ≥ 1.5m در نقاط تصمیم | چک Clearance سهبعدی در BIM | اصلاح گوشهها/پیشفضا؛ پنالتی بینهایت در نقض |
| ↕️ شیب رمپ | Hard | حداکثر شیب در مسیرهای دسترسپذیر | ≤ 1:12 (≈8.33%) | تحلیل توپوگرافی/کات رامپ در مدل | بازطراحی رامپ؛ در نقض ⇒ رد |
| 🚪 ظرفیت درگاه | Hard | عرض آزاد مفید درگاههای مسیر تخلیه | ≥ مقدار کُدی واحد بارگذاری | کنترل خانوادهٔ در/عرض مفید در BIM | تعویض تیپ در/افزودن درگاه؛ نقض ⇒ رد |
| 🔀 تراکم تقاطعها (ID) | Soft | تعداد تقاطع مؤثر در هر ۱۰m از Spine | ≤ 1 تقاطع/۱۰m | استخراج گراف مسیر از CAD/BIM | پنالتی غیرخطی؛ ادغام/جابجایی تقاطعها |
| 📈 نسبت بهرهبرداری کریدور (CUR) | Soft | Q/Qcap در ساعات اوج بهرهبرداری | هدف 0.4–0.7 • سقف 0.8 | شبیهسازی جریان/حسگر شمارش | پنالتی برای CUR>0.7؛ افزایش عرض/توزیع دبی |
| 🧭 خوانایی مسیر (WCI) | Soft | امتیاز دید محوری/کاهش تغییر جهت/نشانهگذاری | ≥ 70/100 برای Spine | تحلیل دید + ممیزی Wayfinding | پاداش برای WCI بالا؛ بهبود محور دید/ signage |
| 🧩 همجواری عملکردی (SAS) | Soft | مجاورت مطلوب فضاهای پرتردد مکمل | ≥ 75/100 | ماتریس Adjacency برنامه فیزیکی | پاداش نزدیکی؛ پنالتی برای مجاورت مزاحم |
| 🛠️ تفکیک مسیر سرویس (SCR) | Soft | کاهش تداخل سرویس با کاربر در اوج | ≤ 2 تداخل/ساعت/زون | زمانسنجی عملیات/شبیهسازی | پنالتی؛ زمانبندی/مسیر پشتصحنه |
| 💡 روشنایی راهرو | Hard | حداقل لوکس روی مسیرهای اصلی | ≥ آستانهٔ کُدی (مثلاً 100–150 lx) | endمحاسبات روشنایی/مدل انرژی | بهبود نورپردازی/بازآرایی تجهیزات |
داشبوردهای بلادرنگ جذاباند؛ اما اگر بدون چارچوب تصمیمگیری استفاده شوند، بهجای راهحل، تبدیل به دامِ داده میشوند. اصل راهبردی این است: هر متریک باید مالک تصمیم، آستانهٔ پذیرش و کنش پس از هشدار داشته باشد. نمایشِ بیشتر، الزاماً بهتر نیست؛ انتخاب اقلیتِ متریکهای مؤثر با اعتبارسنجی سناریویی (عادی/اوج/اضطرار) ضرورت دارد. برای پرهیز از خطای تفسیر، همواره منابع داده (BIM/CAD، حسگرها، شبیهسازها) و نرخ تازهسازی با تمایز عدمقطعیت مستند شود.
متریکهای زیر بیشترین قدرت تغییر تصمیم را در طراحی سیرکولاسیون دارند؛ هرکدام باید با سناریو و آستانهٔ مشخص پایش شوند:
جمعبندی عملی: اگر ECT یا Code Compliance نقض شود، تصمیم عوض میشود؛ در شرایط برابر، WCI/DF خوانایی را ارتقا میدهد و AEI هزینهٔ چرخهٔ عمر را تعیین میکند.
«بهینه» در تکمعیار، اغلب در چندمعیار نادقیق است. سه دام رایج:
نسخهٔ عملیاتی: داشبورد را روی ۵–۷ KPI قفل کنید، باند عدمقطعیت را نمایش دهید، و انتخاب نهایی را با MCDM و گزارش حساسیت مستندسازی کنید؛ در غیر اینصورت، «بهینه» فقط یک عددِ خوشرنگ روی نمودار است.
انتخاب ابزار ژنراتیو باید بر اساس سناریو، نوع پروژه، قیود کُدی و سطح یکپارچگی با BIM/CAD انجام شود. زیر، نقشهٔ تصمیم کوتاه اما عملیاتی برای پنج ابزار شاخص را میبینید.
in3D زمانی میدرخشد که به یک موتور پیشنهاد گزینههای پلان با بازخورد بلادرنگ نیاز دارید. مناسب برای فاز Concept/Schematic که باید سریعاً بین چند طرحِ مطابق کُد تصمیم بگیرید.
Layout روی سناریوهای بازاستفاده/نوسازی تمرکز دارد؛ یعنی وقتی اسکلت، چاهها و مسیرهای موجود تصمیمها را محدود کردهاند.
Spatship وقتی انتخاب اول است که سطح تصمیم از «پلانِ واحد» فراتر میرود و باید همزمان بلوکها، شبکهٔ معابر و ریزاقلیم را بسنجید.
Markets روی مسکونی متمرکز است؛ وقتی ابعاد اتاقها، مجاورت خصوصی/نیمهخصوصی و پاسخ به مقررات محلی اهمیت حیاتی دارند.
وقتی سرعت Iteration و دریافت خروجیهای سازگار با BIM اولویت دارد، Architectures انتخاب امن است.
راهنمای انتخاب سریع: اگر پروژهٔ شما Greenfield و نیازمند غربالگری سریع گزینههاست → in3D. اگر نوسازی با قیدهای سخت سازهای دارید → Layout. برای تصمیمهای شبهشهری تا مقیاس بلوک → Spatship. اگر مسکونی و استانداردهای محلی محور است → Markets. اگر باید زود به BIM/CAD تحویل دهید → Architectures.
خروجی ابزارهای ژنراتیو زمانی به «سند قابل اجرا» تبدیل میشود که در اکوسیستم CAD/BIM بنشیند. راهبرد حرفهای، تعریف یک Pipeline شفاف از تولید گزینه تا تحویل نقشههای اجرایی است: AI → IFC/DXF → مدل مرجع در BIM / نقشههای DWG. در این مسیر، سلامت داده (واحدها، سیستم مختصات، لایهها) و استاندارد دفتر (نامگذاری، فونت، ضخامت خط) باید از همان ابتدا قفل شوند تا دوبارهکاری به حداقل برسد.
وقتی گزینهٔ برنده از موتور ژنراتیو انتخاب شد، Rhino/Grasshopper بهترین بستر برای ریزتنظیم سیرکولاسیون قبل از تحویل به BIM/CAD است. با تعریف پارامترهای هوشمند، میتوان طول مسیر، تراکم تقاطعها، شعاع چرخش و رعایت Code را الگوریتمیک کنترل کرد.
ترفند اجرایی: قبل از Export، یک Bounding Box مرجع و Base Point ثابت تعریف کنید تا در BIM/CAD با مدلهای سازه/تأسیسات بدون Offset هممکان شوید.
نقش AutoCAD در این پایپلاین، تبدیل هندسهٔ منتخب به نقشهٔ اجرایی استاندارد است. توصیههای کلیدی برای ورود IFC/DXF و تحویل DWG آمادهٔ چاپ:
خروجی حرفهای وقتی بهدرد میخورد که DWG همخوان با استاندارد دفتر، وزنخط دقیق، فونتهای قانونی و شیتبندی Plot-Ready داشته باشد. نگاشتِ درستِ لایهها، Annotative صحیح و مدیریت Sheet Set تضمین میکند که محصول ژنراتیو در کارگاه قابل اتکا باشد.
این پروتکل، مسیر گذار از «گزینههای ژنراتیو پراکنده» به «طرح منتخبِ آمادهٔ مستندسازی» را استاندارد میکند. خروجی هر گام، ورودی گام بعدی است و در پایان، یک بستهٔ قابل رهگیری برای BIM/CAD تحویل میشود.
هدف: مدلسازی واقعبینانهٔ جریانهای انسانی و عملیاتی قبل از هر بهینهسازی.
تحویل این گام: «Charter سیرکولاسیون» شامل تعریف پرسونا/سناریو، آستانههای کُدی و ماتریس وزنهای سناریو.
| پرسونا | سرعت مرجع | عرض مؤثر مسیر | حساسیت به تقاطع/ازدحام | اولویت دسترسی | سناریوهای بحرانی |
|---|---|---|---|---|---|
| کاربر عمومی 👤 | 1.2–1.4 m/s | ≥ 1.2 m | متوسط — افت سرعت در ID بالا | عادی | اوج بهرهبرداری (CUR)، راهیابی در شبکه پیچیده |
| ویلچر ♿ | 0.8–1.0 m/s | ≥ 1.5 m (چرخش R≥1.5 m) | زیاد — حساس به شعاع/شیب/درگاه | بالا | دسترسی بدون مانع، شیب رمپ ≤ 1:12، درگاههای آزاد |
| خدمات/لجستیک 🛠️ | 0.9–1.1 m/s | ≥ 1.5 m (سبد/ترالی) | زیاد — تعارض با کاربر (SCR) | متوسط | جداسازی زمانی/مسیر پشتصحنه، درگاههای عریض |
| اضطرار/تخلیه 🧯 | 1.3–1.6 m/s | Spine ≥ 1.8 m | خیلی زیاد — هر تنگنا بحرانی است | بسیار بالا | ECT ≤ حد کُدی، حداقل تقاطع، مسیرهای مستقیم به خروج |
| بازدیدکننده ناآشنا 🧭 | 1.0–1.2 m/s | ≥ 1.2 m | زیاد — وابسته به خوانایی (WCI) | بالا | دید محوری، علائم واضح، کاهش تغییر جهت |
هدف: ساخت سبدی از گزینههای غیرمغلوب با تغییر وزنهای تابع هدف و قفلگذاری تدریجی قیود.
تحویل این گام: ۳–۵ گزینهٔ نامزد با گزارش KPI، نقشهٔ مسیرها، و فرادادهٔ قیود فعال.
هدف: رتبهبندی شفاف گزینهها تحت تضاد معیارها و عدمقطعیت.
تحویل این گام: ماتریس تصمیم، رتبهبندی نهایی، نمودار راداری KPI برای هر گزینه + گزارش حساسیت.
| گزینه | ATD ↓ میانگین طول سفر (۰–۱) |
CUR ↓ نسبت بهرهبرداری کریدور (۰–۱) |
ECT ↓ زمان تخلیه اضطراری (۰–۱) |
WCI ↑ خوانایی مسیر (۰–۱) |
امتیاز نهایی / رتبه |
|---|---|---|---|---|---|
| Option A 🟢 | 0.28 | 0.42 | 0.21 | 0.77 | 0.86 / #1 |
| Option B 🟡 | 0.33 | 0.38 | 0.29 | 0.81 | 0.79 / #2 |
| Option C 🔴 | 0.26 | 0.55 | 0.34 | 0.68 | 0.67 / #3 |
| نرمالسازی ۰–۱ انجام شده است. فلشهای ↑/↓ جهت مطلوبیت را نشان میدهند. امتیاز نهایی با روش TOPSIS از فاصله تا ایدهآل مثبت/منفی محاسبه شده؛ شکست قیود Hard (مثلاً ECT خارج از حد کُدی) موجب حذف گزینه، مستقل از امتیاز میشود. | |||||
هدف: تثبیت گزینهٔ برنده، پیادهسازی جزئیات قراردادی داده، و آمادهسازی خروجیهای پاک برای مدلسازی/مستندسازی.
تحویل این گام: بستهٔ «Issue-Ready» شامل فایلهای IFC/DXF/DWG، لیست قیود قفلشده، گزارش انطباق، و دستورالعمل واردسازی در BIM/CAD.
در مدلهای ژنراتیو، صرفاً «کمکردن طول مسیر» کافی نیست؛ باید برای Intersection Density و زاویههای تند پنالتی غیرخطی تعریف شود تا الگوریتم از ایجاد چهارراههای متوالی و گرههای تعارضی پرهیز کند. قاعدهٔ عملی: اگر فاصلهٔ دو تقاطع < 6m بود یا زاویهٔ تغییر مسیر > 45° شد، ضریب هزینه را تصاعدی افزایش دهید.
مسیر اصلی (Primary Spine) باید پیوسته، خوانا و کوتاهترین راه بین مبادی پرتردد باشد و مسیرهای فرعی با کُد رنگ/خط و تغییر ظریف مصالح از آن تفکیک شوند. ابتدا Wayfinding را قفل کنید، سپس به آرایش عناصر بصری بپردازید؛ برعکسش معمولاً به سردرگمی ختم میشود.
ماتریس Space Adjacency را به تابع هدف وصل کنید: فضاهای پرتردد مکمل (مثلاً پذیرش↔آسانسور، تریاژ↔تصویربرداری) باید پاداش نزدیکی بگیرند و مجاورتهای مزاحم (مثلاً اتاق ساکت↔انبار خدمات) جریمه شوند. این روش بهصورت مستقیم ATD و ACT را کاهش میدهد.
تعیین وزن سناریوها (عادی/اوج/اضطرار) در حین بهینهسازی ضروری است. اگر ECT (زمان تخلیه) در اضطرار از آستانه گذشت، گزینه مردود است حتی اگر در شرایط عادی بهترین ATD را ارائه دهد. همیشه حداقل یک گزینهٔ «تابآور» برای سناریوی بدبینانه نگه دارید.
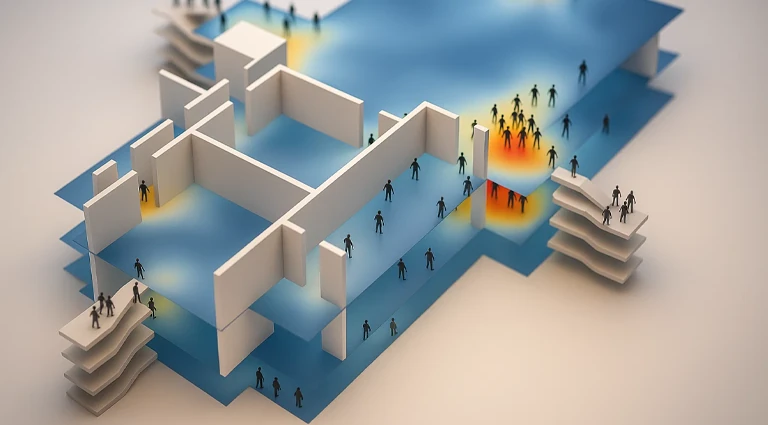
بجای تکیهٔ صرف بر جداول، از Heatmap تراکم، خطوط جریان (Flowlines) و View Axes برای کنترل شهودی WCI استفاده کنید. یک رندر/اسکرینشات ساده از دید کاربر در گلوگاهها، اغلب خطاهایی را نشان میدهد که در اعداد گم میشوند.
| Node/Segment ID | نوع تعارض | شدت/احتمال | KPIهای متاثر | اقدام اصلاحی | وضعیت |
|---|---|---|---|---|---|
| Spine-Jct-03 | 🔀 تقاطع نزدیکِ سهراهه (زاویه تند) | 🔴 High / Likely | ID↑, ACT↑, CUR↑ | ادغام دو شاخه و نرمسازی زاویه به ≥45°؛ افزودن پیشفضا | Open |
| Corr-A-12m | 🧱 کاهش عرض مؤثر (مانع موقت) | 🟠 Medium / Possible | CUR↑, ECT↑ | حذف مانع/جابجایی تجهیزات؛ افزایش عرض به 1.8m | In Progress |
| Egress-Path-B2 | 🧯 طول بیشازحد تا خروج ایمن | 🔴 High / Possible | ECT↑, CCS↓ | افزودن خروج میانی یا مسیر میانبر مستقیم به خروج | Escalated |
| Service-X-07 | 🛠️ تداخل سرویس با مسیر کاربر | 🟠 Medium / Likely | SCR↑, WCI↓ | زمانبندی خدمات خارج از اوج؛ مسیر پشتصحنه موازی | Planned |
| View-Axis-02 | 🧭 خوانایی پایین در گره تصمیم | 🟡 Low / Likely | WCI↓, ACT↑ | ایجاد محور دید مستقیم، نصب Signage دوطرفه | Open |
| Ramp-1F-NE | ↗️ شیب رمپ بالاتر از حد | 🔴 High / Certain | CCS↓, ACT↑ | بازطراحی رمپ به ≤1:12؛ افزودن پاگرد هر 9m | Blocked |
| شدت/احتمال با کُد رنگی: 🔴 High, 🟠 Medium, 🟡 Low. KPIهای متاثر باید در داشبورد پروژه به این گره/بخش Bind شوند. وضعیتها: Open/Planned/In Progress/Escalated/Blocked/Closed. | |||||
خیر؛ همافزایی است. الگوریتم گزینه میسازد و تضاد معیارها را شفاف میکند؛ تصمیم نهایی با طراح مسئول است.
برای تصمیمسازی عالی، برای اجرا نیازمند جزئیات CAD/BIM، استاندارد دفتر (DWS)، و کنترلهای کُدی نهایی هستند.
با MCDM، نمایش باند عدمقطعیت، و تحلیل حساسیت وزنها (±۲۰٪). اگر رتبه با تغییر جزئی وزنها جابهجا شد، طرح ناپایدار است.
قیود کُدی Hard هستند: نقض ⇒ «نامعتبر». در تابع هدف فقط قیود نرم وزن میگیرند؛ ECT/عرضها/دسترسپذیری باید قبل از رتبهبندی پاس شوند.
بله؛ با تعریف کلاس مسیر (اصلی/فرعی/سرویس) و اعمال Penalty برای SCR (Service Conflict Rate). خروجی باید Attribute مسیر را حمل کند.
عدم تطابق واحد/مبدأ مختصات، آشفتگی لایهها و فونتها. راهحل: Layer Translator، Base Point ثابت، OVERKILL/PURGE و DWS.
قیود سازه/تأسیسات اول قفل میشوند. الگوریتم روی راهروهای موجود و اتصالات ممکن بهینه میکند؛ تغییر سازهای فقط با استدلال هزینه–فایده.
سناریومحور: اضطرار ⇒ افزایش وزن ECT، اوج بهرهبرداری ⇒ CUR، پروژههای پیچیده ⇒ WCI. ماتریس وزنها باید ثبت و نسخهبندی شود.
سقف سهم هر KPI، جریمهٔ تعادلی برای نوسان شدید سایر شاخصها، و الزام به گزارش دو-سطحی (کل پروژه + زونهای حساس).
مسیرهای اضطراری، درگاهها، عرضهای حداقل و شعاعهای بحرانی با FLAG=LOCKED علامتگذاری میشوند؛ هر تغییر بعدی نیازمند Impact Report است.
ثبت ورژن تابع هدف، وزنها، KPIهای خروجی و اسکرینشات داشبورد؛ پیوست به بستهٔ Issue-Ready کنار IFC/DWG برای رهگیری.